In the literature, Real-Time Deployment (RTD) is commonly the ‘optimal mass transport’ problem, which formulates the deployment of a multi-agent system as transformation between two arbitrary mass distributions with the desired coordination governed by 6 a continuity partial differential equation. The existing methods are mathematically rigorous and provide guarantee conditions for the stability and convergence of a large-scale multi-agent system coordination between arbitrary configurations in an d-dimensional Euclidean space. However, the available RTD methods commonly model agents with simple dynamics and may not necessarily guarantee collision avoidance in practical problems—when a large-scale UXV team with highfidelity dynamics deploy between two arbitrary configurations. In addition, the mass transport of actual vehicles between moving configurations is a much more challenging and safety-critical since the diverse initial and final velocities can result in inter-agent collisions—a situation not yet investigated.
We will offer a physical approach to the RTD problem that appropriately incorporates and addresses the above issues. In particular, we will investigate the problem of RTD of UXVs, with high fidelity dynamics, between arbitrary moving configurations. We will formally specify and verify the safety of UXV coordination by satisfying the state and input constraints, to ensure inter-agent collision avoidance and containment of the cooperative UXVs by the enclosing containment box. This new proposed paradigm will have two main operational modes: (i) pre-consensus coordination to assure that the UXVs all reach the uniform velocity before RTD is commanded; and (ii) RTD between rigid configurations (RTD-BRC).
Publications (in last 5 years):
Hossein Rastgoftar, 2022, "Real-Time Deployment of a Large-Scale Multi-Quadcopter System (MQS)".
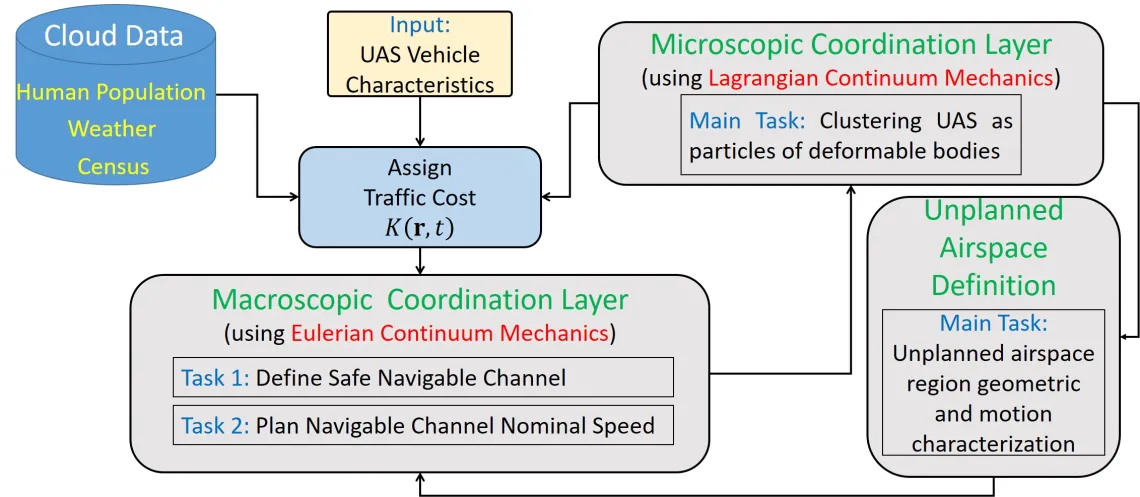
Functionality of the proposed physics-inspired UAS traffic management model
This project will develop mathematical foundations to safely and efficiently coordinate the Unmanned Aircraft Systems (UAS) traffic envisioned to routinely fly above urban centers. Per emerging UAS Traffic Management (UTM) standards, a dedicated transit airspace layer will assure UAS are separated from manned aircraft traffic allowing UAS to focus on coordinating with each other. The project is for a two-layer physics-based approach to route UAS as coordinated flow through high-density airspace transit channels. At the top "macroscopic" coordination layer, UAS will be assigned to traffic channels based on their destinations and physical ability to coordinate flight paths with each other. At the "microscopic" coordination layer, the existing continuum deformation cooperative control strategy will be extended to allow large-scale UAS groups to efficiently follow routes that respect airspace channel geometries backed by mathematical guarantees of collision avoidance. The project also defines an interface between macroscopic and microscopic layers to deal with unpredicted events and UAS failure in a resilient fashion. The theoretical achievements of the project will be supported by large-scale simulations and flight experiments.
The project offers a physics-inspired traffic coordination approach for Unmanned Aircraft System (UAS) traffic management. The available physics-inspired approaches previously applied to highway traffic flow will be extended for low-altitude UAS traffic coordination in which no predefined paths exist. Airspace is considered a finite control volume in which coordinated UAS treated as a continuum deformation organize traffic flow within airspace channels prescribed by higher-level macroscopic coordination. Eulerian continuum mechanics efficiently defines macroscopic coordination as the solution of a parabolic partial differential equation (PDE) with spatiotemporal parameters. It is assumed vehicles operating in the planned airspace admit the nominal coordination, while unplanned airspace envelops no-fly zones and non-cooperative UAS. At the microscopic level, clustering vehicles is suggested based on vehicle performance limits. UAS clusters, with each UAS treated as a particle of a deformable body, use generalized leader-follower continuum deformation coordination to acquire the desired macroscopic coordination by local communication. This advances the existing theory by relaxing constraints on inter-agent communication topology and leaders' locations. The project's approach offers resilience to vehicle failures and rapid changes in airspace availability by formal safety analysis. Specifically, an adaptive boundary control algorithm will be developed to remove a non-cooperative or failed UAS from safely-coordinated channels in planned airspace. Large-scale simulations and flight tests will be used to refine models and validate coordination concepts.
Publications (in last 5 years):
- Hamid Emad, Ella Atkins, and Hossein Rastgoftar, 2022, "A Finite-State Fixed-Corridor Model for UAS Traffic Management," submitted to IEEE Transactions on Intelligent Transportation Systems (under review).
- Hossein Rastgoftar and Ella Atkins, 2019, "Physics-based freely scalable continuum deformation for UAS traffic coordination," IEEE Transactions on Control of Network Systems.
We can apply the continuum mechanics principles to define coordination of large-scale multi-agent system (MAS) as a leader-follower algorithm. Under continuum deformation, no two particle agents occupy the same position during evolution, while the MAS has the capability of large-scale expansion and contraction. The primary objectives of this approach are to develop the necessary theory and its validation on a mobile-agent based swarm testbed that includes two primary tasks: 1) collective motion and 2) deployment of a random distribution of agents in a desired configuration. I have demonstrated MAS continuum deformation under (1) no inter-agent communication, (2) local inter-agent communication, and (3) intelligent perception by agents. We studied formal specification of continuum deformation coordination safety in an obstacle-laden environment. Using linear temporal logic (LTL), we provided liveness and safety conditions for (i) agent deviation bound, (ii) inter-agent collision avoidance, (iii) agent containment, (iv) motion space containment, and (v) obstacle collision avoidance, and reachability of the desired final formation. This work is followed by continuum deformation optimization of large scale UAVs, clustered into a finite number of vehicle teams, in a cluttered environment. More specifically, we developed an A* planner to optimize continuum deformation coordination of different clusters from initial to final configuration in a manner that satisfies safety and liveness constraints. We have also investigated cooperative aerial payload transport by autonomous Multi-UAV (Unmanned Aerial Vehicle) System (MUS) as an application for MAS continuum deformation. The main objective of this project is to manage a cooperative MUS transport mission through task-level autonomy given a fixed set of MUS leaders and followers. An underlying cooperative control strategy motivated by continuum deformation will enhance the resilience, scalability and safety of the transport mission. We have studied two cases to-date: (i) Autonomous transport, and (ii) Semi-autonomous transport supervised by a human companion guiding the payload with haptic inputs. For the autonomous transport mission, we have already shown how leaders can autonomously optimize a continuum deformation in real-time where inter-agent collision can be avoided by satisfying an inequality constraint imposed on eigenvalues of the pure deformation matrix of the continuum transformation. For the second case, we show that the “human intent”, characterized by a single pushing force, can be recognized and executed by MUS team leaders in real-time by applying the principle of linear momentum transfer. Once the human supervisor’s input force is estimated, the leader UAVs of the MUS assign optimal waypoints to the payload such that collision avoidance constraints are satisfied. In an open environment an input force will result in a direct change of traversal direction.
Sample Publications
Continuum Deformation Coordination Optimization
Hossein Rastgoftar, Ella M Atkins, and Ilya V Kolmanovsky, 2021, "Scalable Vehicle Team Continuum Deformation Coordination with Eigen Decomposition," IEEE Transactions on Automatic Control.
Hossein Rastgoftar, 2022, "Integration of A* Search and Classic Optimal Control for Safe Planning of Continuum Deformation of a Multi-Quadcopter System," IEEE Transactions on Aerospace and Electronic Systems.
Zihao Liang, Hossein Rastgoftar, and Ella M Atkins, 2019, "Multi-Quadcopter Team Leader Path Planning Using Particle Swarm Optimization," AIAA Aviation 2019 Forum.
Hossein Rastgoftar and Ella M Atkins, 2019, "Safe multi-cluster UAV continuum deformation coordination," Aerospace Science and Technology.
Affine Transformation of Multi-Agent Systems
Hossein Rastgoftar and Ilya V Kolmanovsky, 2021, "Safe affine transformation-based guidance of a large-scale multiquadcopter system," IEEE Transactions on Control of Network Systems.
Deformable UAS in a Cooperative Payload Transport Mission
Hossein Rastgoftar and Ella M Atkins, 2018, "Cooperative Aerial Payload Transport Guided by an In Situ Human Supervisor," IEEE Transactions on Control Systems Technology.
Hossein Rastgoftar and Ella M Atkins, 2018, "Cooperative aerial lift and manipulation (calm)," Aerospace Science and Technology.
Hossein Rastgoftar and Ella M Atkins, 2018, "Continuum deformation of a multiple quadcopter payload delivery team without inter-agent communication," 2018 International Conference on Unmanned Aircraft Systems (ICUAS).
Fault-Resilient Multi-Agent Coordination
Hossein Rastgoftar, 2020, "Fault-resilient continuum deformation coordination," IEEE Transactions on Aerospace and Electronic Systems.
Hamid Emadi, Harshvardhan Uppaluru, Hossein Rastgoftar, 2022, "A Physics-Based Safety Recovery Approach for Fault-Resilient Multi-Quadcopter Coordination," Appears in the proceeding of the 2022 American Control Conference.
Continuum Deformation Coordination Using Cooperative Localization
Hamid Emadi, Harshvardhan Uppaluru, Hashem Ashrafiuon, and Hossein Rastgoftar, 2022, "Collision-Free Continuum Deformation Coordination of a Multi-Quadcopter System Using Cooperative Localization," Appears in the proceeding of the 2022 European Control Conference.
Hossein Rastgoftar, Sergey Nersesov, and Hashem Ashrafiuon, 2021, "Continuum Deformation Coordination of Multi-Agent Systems Using Cooperative Localization," 2021 IEEE Conference on Control Technology and Applications (CCTA).
Experimental Evaluation of Continuum Deformation Coordination
Matthew Romano, Prince Kuevor, Derek Lukacs, Owen Marshall, Mia Stevens, Hossein Rastgoftar, James Cutler, Ella Atkins, 2019, "Experimental evaluation of continuum deformation with a five quadrotor team," the 2019 American Control Conference.
Harshvardhan Uppaluru and Hossein Rastgoftar, 2022, "Drones Practicing Mechanics".
Fundamentals of Continuum Deformation Coordination
Hossein Rastgoftar, 2016, "Continuum deformation of multi-agent systems," Springer.
Hossein Rastgoftar and Suhada Jayasuriya, 2014, "Evolution of multi-agent systems as continua," Journal of Dynamic Systems, Measurement, and Control.
Hossein Rastgoftar, Ella M Atkins, and Dimitra Panagou, 2018, "Safe multiquadcopter system continuum deformation over moving frames," IEEE Transactions on Control of Network Systems.
Hossein Rastgoftar, Harry G Kwatny, and Ella M Atkins, 2016, "Asymptotic tracking and robustness of MAS transitions under a new communication topology," IEEE Transactions on Automation Science and Engineering.
Hossein Rastgoftar and Ella M Atkins, 2017, "Continuum deformation of multi-agent systems under directed communication topologies," Journal of Dynamic Systems, Measurement, and Control.
Hossein Rastgoftar and Sergey Nersesov, 2021, "Continuum deformation of a multi-quadcopter system under time-varying communication weights," Aerospace Science and Technology.
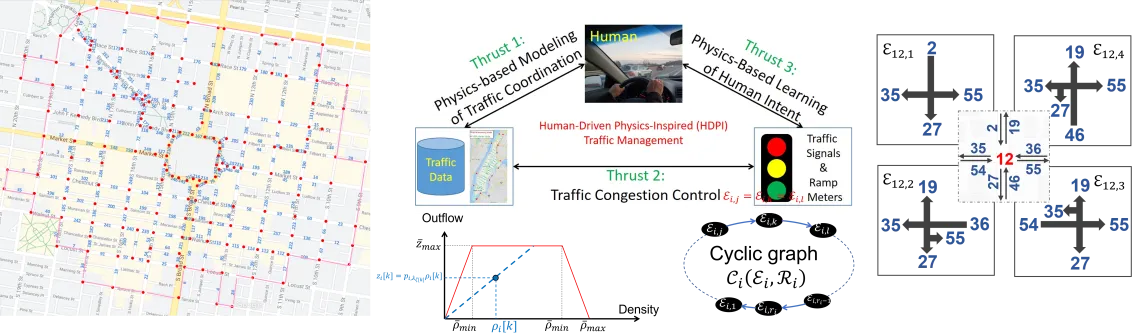
We model traffic coordination as a non-stationary Markov process and introduce novel conservative and aggressive approaches to obtain traffic dynamics as linear time-varying and linear parameter-varying problems, respectively. To assure the feasibility of the proposed traffic coordination modeling, inequality and equality constraints are imposed by a Trapezoid Fundamental Diagram (TFD) were parameters of the TFD are consistently updated based on the real-time traffic data.
Publications
Hossein Rastgoftar, Xun Liu, and Jean-Baptiste Jeannin, 2022, "A Concurrent Switching Model for Traffic Congestion Control".
Hossein Rastgoftar and Jean-Baptiste Jeannin, 2021, "A physics-based finite-state abstraction for traffic congestion control," 2021 American Control Conference (ACC).
Harshvardhan Uppaluru, Hamid Emadi, Hossein Rastgoftar, 2022, "A Continuous-Time Optimal Control Approach to Congestion Control," Appears in the Proceeding of the 2022 European Control Conference.
Hossein Rastgoftar, Jean-Baptiste Jeannin, and Ella Atkins, 2020, "An Integrative Behavioral-Based Physics-Inspired Approach to Traffic Congestion Control," Dynamic Systems and Control Conference.
Hossein Rastgoftar and Anouck Girard, 2020, "Resilient physics-based traffic congestion control," the 2020 American Control Conference (ACC).
We have developed high-level decision-making models for off-road driving navigation and long-duration surveillance missions over the recent years.
Off-Road Driving Autonomy: We have studied autonomous off-road driving and proposed an innovative data driven approach to vehicle motion planning and control in off-road driving scenarios. This research complements the existing work that incorporates geographical information system (GIS) and cloud-based National Oceanographic and Atmospheric Administration (NOAA) data sources to enable an off-road vehicle planner to build a traversable and efficient route through complex off-road terrain. In this work, motion planning and control layers are integrated to enable off-road autonomous driving. A top-level global route planner (GRP) defines optimal waypoints using dynamic programming (DP). A local path planner (LPP) computes a desired trajectory between waypoints such that infeasible control states and collisions with obstacles are avoided. The LPP also updates the GRP with real-time sensing and control data. A low-level feedback controller applies feedback linearization to asymptotically track the specified LPP trajectory. Off-road self-driving case studies in the Ochoco National Forest (Oregon) and a locale in Indiana, near Lake Michigan have been investigated.
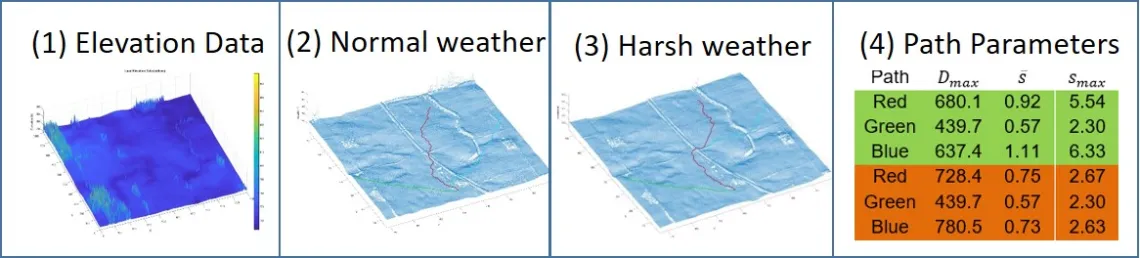
Data-driven off-road planing: (1) Land Elevation Map (Indiana, coordinate (41.1003777, −86.4307332)). (2) Distances
Dmax(m) maximum and average slopes smax and ̄s of planned paths under nominal and harsh (wet) weather conditions are shown in green and orange cells,
respectively. (3, 4) Three path plans are generated given the same start point with different constraint sets under nominal and harsh weather conditions.
Publication
Hossein Rastgoftar, Bingxin Zhang, Ella M Atkins, 2018, "A data-driven approach for autonomous motion planning and control in off-road driving scenarios," the 2018 American Control Conference.
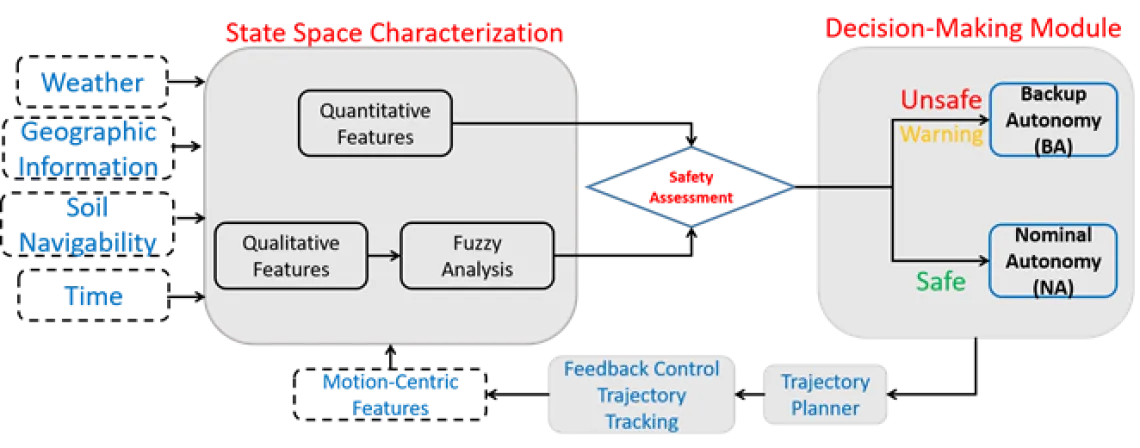
Long duration Autonomy: As part of a multidisciplinary project sponsored by the Office of Naval Research (ONR), we have studied the underwater surveillance problem in which an autonomous underwater vehicle (AUV) is deployed for a long duration search mission such as pollution monitoring, undersea exploration and data-collection, and disaster prevention. In a long duration mission, an AUV must deal with uncertainties in the environment as well as its own performance characteristics. Thus, it will have imprecise or incomplete knowledge over which the mission must be planned. Furthermore, AUV commonly needs to communicate with a control station on the sea surface while underwater wireless communication is difficult and occurs at low bandwidth. Therefore, long-duration unmanned vehicle missions with unreliable communication require flexible onboard planning to assure controls are appropriate for an uncertain environment. We applied the Markov Decision Process (MDP) model to deal with this highly-complex decision-making problem. More specifically, we have contributed a novel partitioning of MDP state space features by their controllability, which for the AUV translates to controllable motion-centric features (e.g., AUV location over time) versus uncontrollable ambient or environment features (e.g., water temperature). We have applied the Regional Ocean Modeling System (ROMS) software to model the evolution of environmental features. Controllable state feature transition probabilities are either deterministic (binary-valued) or probabilistic with statistics based on a priori simulations and AUV experiments, whereas uncontrollable or ambient state feature transition probabilities are initially estimated based on a priori observations and simulations but then learned or adapted online.
Publication
Hossein Rastgoftar and Ella M Atkins, 2017, "Unmanned vehicle mission planning given limited sensory information," the 2017 American Control Conference.